近日,我院赵子龙教授及其合作者在综合类顶级期刊《The Innovation》(中科院分区1区;影响因子:25.7;引用分:53.4)发表论文《Robotic ray driven by periodic ring snapping》。他们从蓝斑条尾魟优雅的泳姿中获得灵感,提出了新颖的水下驱动方式,研发出高效、稳定且隐蔽的仿生软体机器鱼。这项成果在海洋探测、水下机器人等领域有潜在的应用价值。
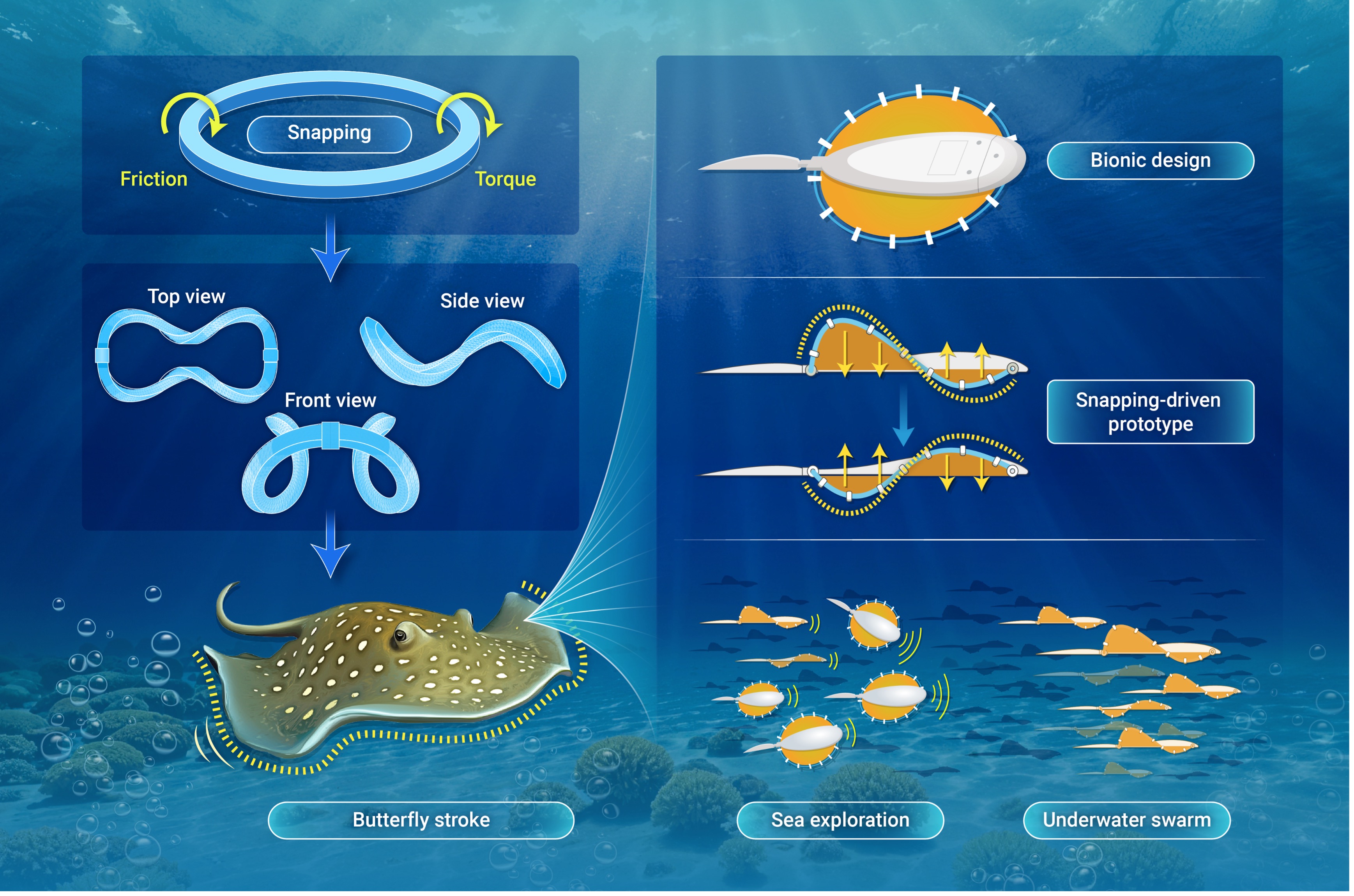
在游动时,蓝斑条尾魟的胸鳍发生低频周期性波动变形(图1)。与尾鳍推进方式相比,胸鳍式游动对周围流场的扰动更小,并且可以具有更高的能量利用效率。通过协同控制多个电机虽然可以模拟胸鳍式游动,但系统的结构复杂、能耗高、隐蔽性差。如何高质量地仿造、复现鱼类的胸鳍式游动是水下机器人领域的一个挑战性难题。赵子龙等注意到,弹性圆环在受扭失稳后所呈现的后屈曲构型与魟鱼胸鳍边缘的波动形态高度相似。受此启发,研究团队提出了新颖的水下驱动方式——利用弹性系统的结构失稳引发周期性连续波动。
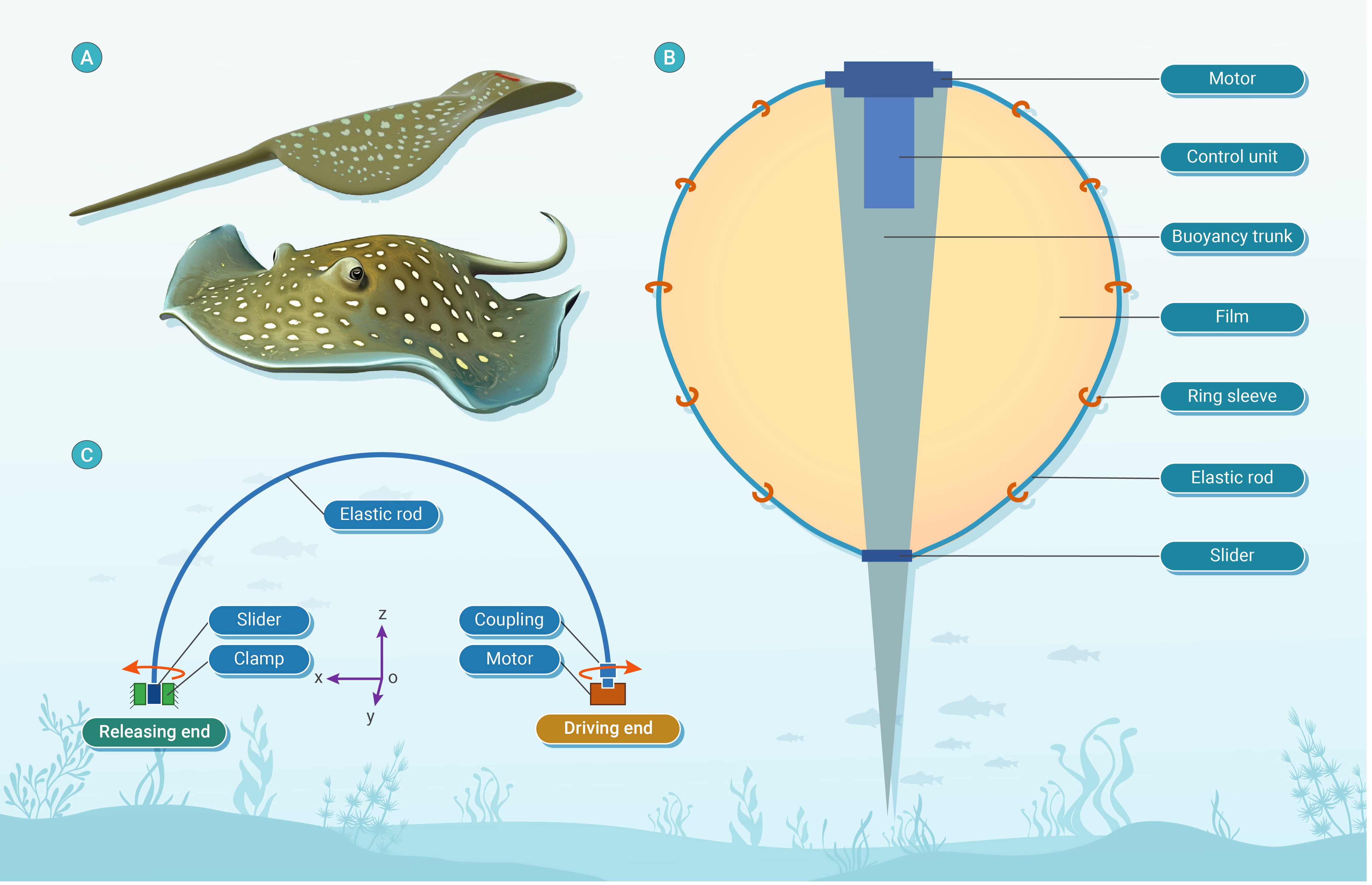
图1 概念设计。(A)蓝斑条尾魟;(B)仿生软体机器鱼结构布局;(C)鳍面驱动装置。
在提出新型水下驱动方式之后,研究者们给出了机器鱼的初始设计。如图2所示,他们开展了系统深入的理论、计算与实验研究。首先,建立理论模型,阐释了受扭失稳后圆环形貌演化的力学机理,为鱼鳍的结构设计与优化提供了科学依据。结果显示,结构几何、材料属性等均会显著影响圆环的后屈曲形貌演化;通过调节相关参数,可以赋予鱼鳍多样化的变形模式,从而满足不同场景的游动需求。接着,结合理论分析和数值模拟,研究者们确定出能使推力最大化的鱼鳍结构,为机器鱼性能优化奠定了基础。
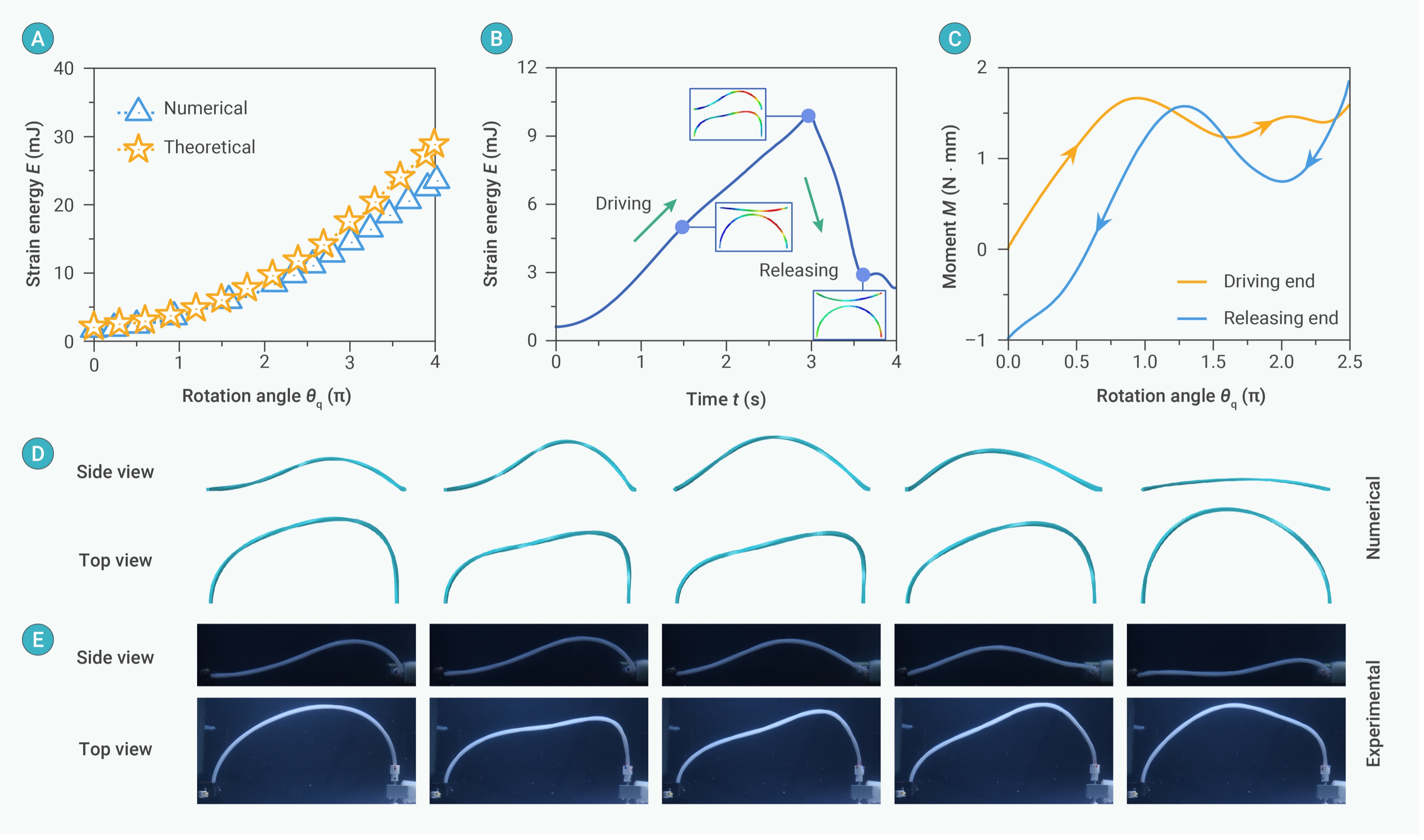
图2 受扭弹性杆的力学分析。(A)系统的弹性应变能随转角的变化;(B)系统的弹性应变能随时间的变化;(C)释放端与驱动端力矩随转角的变化;(D)数值计算和(E)实验观测到的半圆环的后屈曲形貌演化。
如图3所示,研究者们通过环形套管将弹性圆环和机器鱼鳍面的外边缘相连。圆环的驱动端与电机相连,释放端则与滑块相接。电机转动时,对圆环施加扭矩;圆环受扭发生结构失稳,带动鳍面产生波动变形。当滑块与夹具之间的摩擦力达到临界值时,圆环释放端开始反向旋转,在短时间内释放弹性应变能。经由上述过程,可以实现鳍面的周期性连续波动,推动机器鱼在水下高效、稳定地行进。如图3E所示,该机器鱼在游动过程中展示出与蓝斑条尾魟高度相似的形貌特征。
进一步,研究者们开展了系统的实验测量,评估了机器鱼的推进效率、稳定性,以及隐蔽性。他们揭示了鳍面形状、电机转速,以及释放端临界摩擦力等对机器鱼游动速度的影响规律。与现有的仿生机器鱼相比,在负重与航行距离相同的前提下,该设计的能量消耗有显著降低。此外,经在天然湖泊实地测试,证实了该机器鱼低噪、高效、环境适应能力强等优异性能。
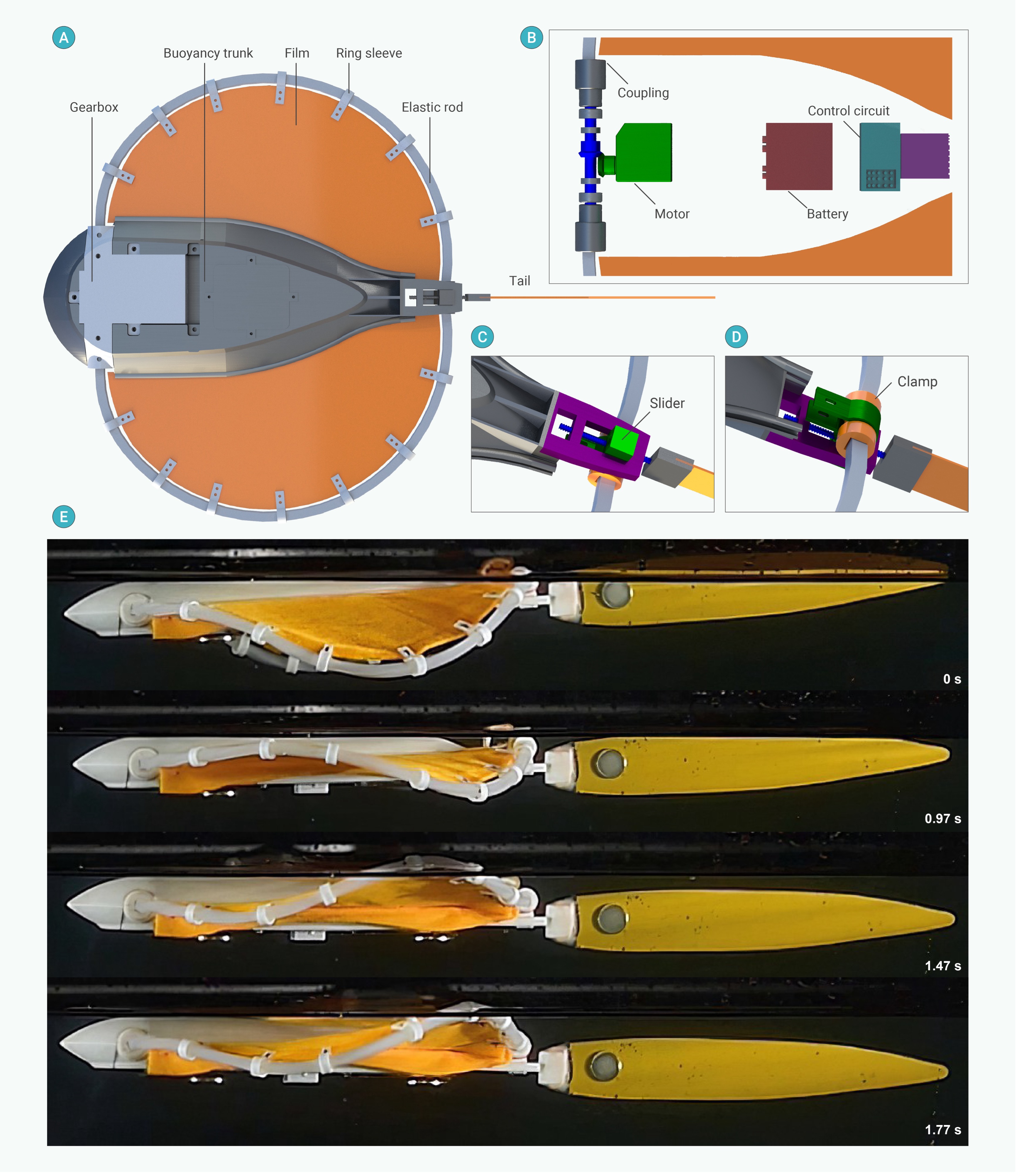
图3 仿生软体机器鱼的结构细节。(A)—(D)机器鱼的机械结构设计;(E)机器鱼在游动过程中的鳍面形貌演化。
该仿生软体机器鱼具有驱动方式新、游动效率高、结构简单、行进稳定、行为隐蔽、环境适应能力强、运载能力佳、可扩展性好等优点。通过安装光学、力学等各类传感器,有望将其用于海洋探测、水下作业等领域。同时,这项工作也为其他变体仿生机器人设计提供了新的思路。
我院赵子龙教授(个人主页:http://shi.buaa.edu.cn/zzl/zh_CN)是论文的唯一第一作者,兼通讯作者。他是国家级青年人才(2020),澳大利亚国家优秀青年人才(2019),国际著名SCI期刊《Eng. Fract. Mech.》编委,国自然基金委评审专家,教育部评审专家,航空航天与控制工程国际学术会议大会主席(2024),应用力学与机械工程国际学术会议大会主席(2025)。他的主要研究方向是固体力学、生物力学和结构拓扑设计。论文合作者包括我院博士研究生王志鹏、硕士研究生田霖,西南科技大学袁卫锋教授、谢琦硕士,以及中国力学学会副理事长清华大学冯西桥教授。研究得到了国家自然科学基金、中央高校基本科研业务费专项资金的资助。
原文链接:
https://www.sciencedirect.com/science/article/pii/S266667582500236X
 EN
EN
